

Motion systems
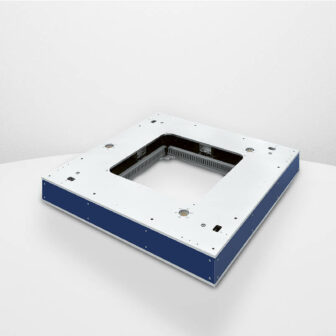
AQUARIUS
AQUARIUS is an actuator designed for applications where force, throughput, durability and reliability are required – all in a compact form factor. It is ideal for applications that require an independent Z-axis for testing handheld devices and offers optimal performance. This solution is suitable for various applications where precision and high dynamic are important. With a…
Show product