
IMP Library
The Interpolated Motion Planning (IMP) is a specialized trajectory generation and execution library tailored for optimal performance with UltimET and AccurET controllers.
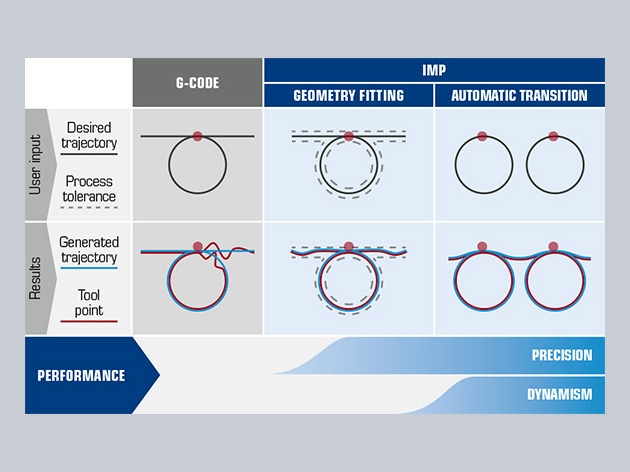
IMP offers a comprehensive solution for trajectory generation applications requiring high precision and performance. It excels in providing precise geometry fitting features and automatic transitions while adhering to various kinematic constraints like velocity, acceleration, and jerk.
Moreover, IMP facilitates event management capabilities for executing specific actions at precise positions along the trajectory.
Characteristics
- Pre-processing and optimization of complex trajectories
- Combines accurate trajectory fitting and automatic transitions
- Optimized performance based on motion system kinematic constraints
- Well suited for laser processing equipment

Optimized Trajectory Control
Here are the key features:
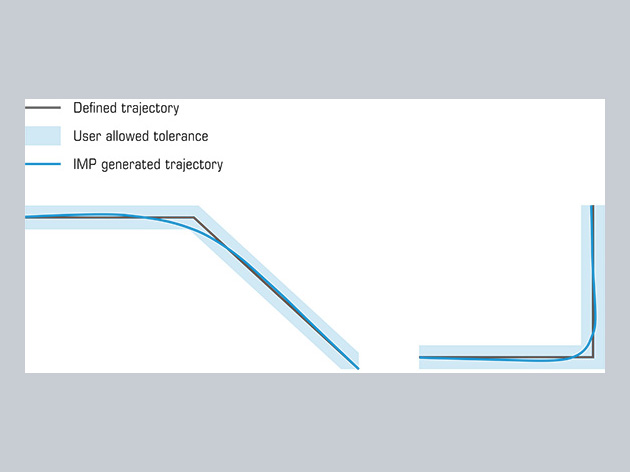
It allows users to define two types of trajectory elements: geometry fitting for precise path following within defined tolerances, and automatic transitions for smooth movement between patterns.
It contributes to increased machine throughput by enabling faster trajectory completion and reducing vibrations and settling times.
Users can expect improved process quality as IMP ensures no compromise on trajectory fitting quality, allows setting boundaries and constraints at the trajectory level, and facilitates verification of global machine limitations.
It offers multiple pre-defined trajectory primitives such as circles, lines, polynomials, and splines, making trajectory definition flexible and easy. Pre-processing and optimization are performed offline, while execution occurs in real-time.
Downloads
| Product | ||
|---|---|---|
IMP | Documents | |